 Click here to see this album |
Etna - 18/07/2000 |
|
During these trials several measurements of volcanic environment were performed by using a manually moved cart.
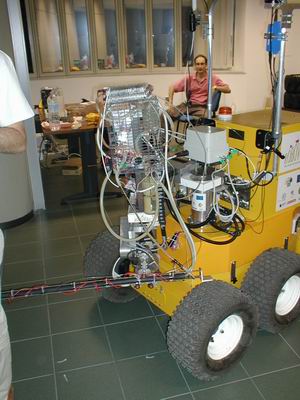
Moreover in this mission the hybrid robot Wheeleg was tested on volcanic environment. Wheeleg is a prototype of mobile robot with two front legs and two rear wheels. |
|
 Click here to see this album |
Etna - 03/08/2000 |
|
Measurement of several parameters of the volcanic environment by using the cart: Terrain slope, temperatures, path length, pressure, humidity, odometry and GPS recording.
Sartorius craters and Etna central crater |
|
 Click here to see this album |
M6 Lab - 24/08/2001 |
|
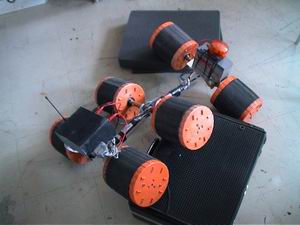
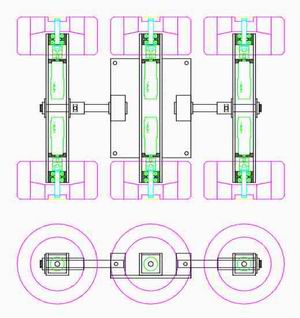
M6 Robot: a small prototype of the Robovolc robot with a six degrees of freedom chassis and six independently actuated wheels. Trials performed in the DIEES Robotic Laboratory.
|
|
 Click here to see this album |
M6 Outdoor - 20/09/2001 |
|
M6 Robot: a small prototype of the Robovolc robot with a six degrees of freedom chassis and six independently actuated wheels. Trials of the M6 prototype performed in unstructured outdoor environment.
|
|
 Click here to see this album |
M6 Etna - 04/10/2001 |
|
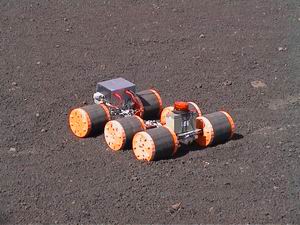
M6 Robot: a small prototype of the Robovolc robot with a six degrees of freedom chassis and six independently actuated wheels. Trials of the M6 prototype on the Etna volcano.
|
|
 Click here to see this album |
Portsmouth - 15/10/2001 |
|
First Prototype of the Robovolc Robot: some traction tests at Portsmouth.
|
|
 Click here to see this album |
Cart - 10/01/2002 |
|
Cart Platform: The cart platform has been specifically designed to test the localization algorithm of Robovolc. The equipment onboard is composed by a GPS system, a pair of digital encoders, two inclinometers and an acquisition board connected to a laptop.
|
|
 Click here to see this album |
P6W - 23/01/2002 |
|
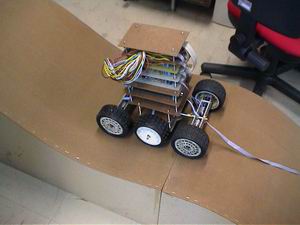
P6W Robot: "Six Wheels Prototype", a small 1:4 scale prototype of the Robovolc platform designed to test the traction control strategies in laboratory. A Motorola MPC555 microcontroller is used to control six power boards with embedded current control and to save all the variables of the strategy for post elaboration purpose.
|
|
 Click here to see this album |
Navigation - 26/02/2002 |
|
Navigation/localization tests: the "Cart" platform has been used to test the localization strategy based on a Differential GPS system and odometry while the M6 robot has been used to test a simple navigation algorithm.
|
|
 Click here to see this album |
P6W - 14/06/2002 |
|
P6W Robot: "Six Wheels Prototype", a small 1:4 scale prototype of the Robovolc platform designed to test the traction control strategies in laboratory. A Motorola MPC555 microcontroller is used to control six power boards with embedded current control and to save all the variables of the strategy for post elaboration purpose.
|
|
 Click here to see this album |
Bristol - 20/06/2002 |
|
Different kind of tires have been tested on the first Robovolc platform prior to choose the final one.
|
|
 Click here to see this album |
Etna Trials - 05/09/2002 |
|
Several preliminary tests have been conducted on the Etna mountain using the first platform prototype. The tests have been performed at Piano delle Concazze, close to the Pizzi Deneri Observatory. The images show some traction trials, localization/navigation tests using different kind of sensors.
Video of these trials: |
|
 Click here to see this album |
INGV Trials - 06/09/2002 |
|
First test Campaign of the Robovolc system: Some preliminary tests have been performed at the INGV laboratory (Nicolosi).
|
|
 Click here to see this album |
Trials - 12/09/2002 |
|
First test Campaign of Robovolc: The whole system has been tested on volcanic environment.
Sensors for science, manipulator and platform control have been tested for the first time integrated together. Video of these trials: |
|
 Click here to see this album |
Etna Trials - 13/09/2002 |
|
First test Campaign of Robovolc: The rover platform was tested inside several Etna craters and in hard lava terrains to understand traction capabilities.
Some videos of these trials: |
|
 Click here to see this album |
Gas Sampler - 14/09/2002 |
|
Preliminary trials of the first version of the gas sampling probe connected to the manipulator.
|
|
 Click here to see this album |
P6W Traction Control Trials - 12/06/2003 |
|
The six Wheel Prototype of Robovolc "P6W" has been realized in order to try different traction control strategies, for this reason a container full of 8 Kg of rice has been used in order to simulate a sandy terrain like that caused by volcanic ash.
|
|
 Click here to see this album |
INGV Trials - 21/06/2003 |
|
Laboratory test of pan-tilt system and sensors, science package and platform.
|
|
 Click here to see this album |
INGV - 25/06/2003 |
|
Further integration test in laboratory. Integration of sensor for science and manipulator in the platform.
|
|
/ImageDir.jpg) Click here to see this album |
INGV Trials (ARM) - 26/06/2003 |
|
Laboratory test of the manipulator. Teleoperations for picking objects.
|
|
/ImageDir.jpg) Click here to see this album |
INGV Trials (ARM) - 27/06/2003 |
|
Outdoor test of manuipulator and Navigation. Test of stone collecting operation.
Video of these trials: |
|
 Click here to see this album |
Etna Trials - 28/06/2003 |
|
Test of the full system in volcanic environment. Tests performed on the base of the 2002 eruption crater: Rock collecting, sensors for science, navigation, teleoperation, traction control in sandy environment.
Some videos of these trials: |
|
 Click here to see this album |
Etna Trials - 01/07/2003 |
|
Trials performed inside the 2003 eruption craters: Test of traction, test of different tyre types, test of rock collecting procedure, test of final configuration of base station, test of HCI.
Video of these trials: |
|
 Click here to see this album |
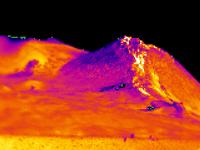
Etna Trials (IR) - 01/07/2003 |
|
IR thermal images of SE crater. Brighter zones indicates higher temperatures.
|
|
 Click here to see this album |
Etna Trials - 02/07/2003 |
|
Demonstration of the Robovolc system performed at the end of the press conference.
|
|
 Click here to see this album |
Gas Sampler - 4/07/2003 |
|
Final test of the gas sampling system and probe connected to the manipulator.
Video of these trials: |
|
 Click here to see this album |
INGV Trials - 13/08/2003 |
|
Integration of new low level control board. Traction validation test at INGV laboratory NICOLOSI.
|
|
 Click here to see this album |
Monti Rossi Trials - 27/08/2003 |
|
Trials in Nicolosi Monti Rossi site. Traction control test with different type of tyres and with the traction control system.
Video of these trials: |
|
 Click here to see this album |
Etna Trials - 29/08/2003 |
|
Final test: Traction control, sensors for science, localisation, navigation, manipulator control, rock collection, traction control with different tyres.
Video of these trials: |
|
All the movies are compressed in DivX format, the DivX codec can be installed from the DOWNLOAD PAGE. |
|