|
ROBOVOLC Activities: March 2000 - August 2003
Description of the Robovolc Activities
- Final version of the platform manufactured and tested
in laboratory and in volcanic environment
- SCARA manipulator and gripper manufactured and tested
- Gas sampling system designed and tested
- Localisation system designed and tested
- Sensor turret designed and tested
- Navigation system designed and tested
- System tested in volcanic env.
- Exploitation plan proposed
|

|
In the first year much of the time was spent in defining the problem, formulating the requirement and getting a good working communications between the different partners and their perception for the Robovolc system. The language of the end-users (volcanologists) and the technology providers (Universities and companies) needed some framework to be developed so that a common understanding in what was needed and what could be provided both from technological view-point and from economical considerations was matched as best as possible. In addition to initiating the technical aspects of the project, publicity regarding the Robovolc project has also been initiated in a variety of ways, since this is a high profile project which will be highly visible.
In the second year the specification of the system have been defined in detail a functional design of the system was done and the detailed design of each subsystem was started. An important result was the final choice of the locomotion concept: a wheeled vehicle with a high adaptive chassis. Moreover some tests of small scale prototypes have been performed in the volcanic environment.
During the third year the design phase has been completed. The plan for integration has been prepared and continuously updated. The manufacturing of a six wheeled platform was completed. The platform is integrated with a first version of the motion control board and with the radio link for teleoperations.
The manufacturing of the SCARA manipulator and of the gripper has been completed.
The navigation strategies for the manipulator arm and for the robot base have been determined. First release of the software for navigation of the user interface. Firs release of the localisation software. All sensors have been aquired and tested. Integration and interfacing of all sensors performed. Integration of manipulator and sensors on the platform performed.
Two weeks of trials done in September 2002 in Etna volcano and in laboratory.
In the last part of the project the integration of the final system has been completed, all the subsystems have been tested in laboratory.
Then several test campaigns on volcanic terrains have been conducted to validate the system fuctionalities.
The details of the assessment of work done is next summarised on a workpackage basis
WP1 Project management, assessment and evaluation
A management strategy has been formulated as per the technical annex, with the identification of the various board, preparation of guidelines for deliverables, presentation standards, deadlines, information flow reporting, and a WEB site protected by password has been set-up with all the documents related to the project enclosed. Twelve project meeting a sensor meeting and a navigation meeting have been held with wide participation of all partners. A quality plan has been prepared using the methodology of one of the partner who is ISO9000 accredited.
Go Back to WP Menu'
WP2 Requirements Engineering
This workpackage focused on bringing together the needs of the volcanologists for site monitoring, collecting samples with what was achievable from the technological viewpoint.
Task 2.1 Current state analysis - volcanology robots sensing,etc.
This has focused on identifying robotics state of the art for similar activities. An extensive report has been produced as deliverable D2a.
A paper has been presented at the CLAWAR 2000 Conference in Madrid :
Robots for Volcanos: the state of the art
Task 2.2 Definition of user and general requirements
The aim was to understand the requirements for the robot from the point of view of the measurements to be performed and the typical volcanic environment where the robot will be used. A report has been produced as deliverable D2b. Analysis of the requirement for the proposed system. Further updates on the requirement will be needed as activities proceeds further. Direct on-site measurement of typical robotic missions of environmental parameters by means of a specifically designed probe were performed.
Task 2.3 Specific system requirements and likely costs
The requirements and state of the art in technology was used in this task to consider different possibilities for the Robovolc system and how such systems would perform. Using the experience of the technology providers subjective analysis of the various possibilities was carried out and each configuration assessed in its ability to perform the tasks required. It represented one of the main result in this phase of the project coming from the common work between the users and the technology providers. A preliminary cost implication analysis was performed. The important result is that the consortium agree that the objective can be achieved within the time/budget constraints (Milestone MS1). Further analysis on this aspect will arise as soon as the detailed specifications will be available. A Draft validation plan has been produced to ensure on quality of the work carried out as a complementary documents to the Technical Annex and the Quality Plan.
Go Back to WP Menu'
WP3 System specifications and design scheme
In this Workpackage the ROBOVOLC specifications and system concept have been developed in parallel in order to provide a first issue of the detailed system description and specification. As agreed by the partners, this concept definition simultaneously describes the top-level specifications and system concept in order to try and quickly mate requirements, capability and constraints.
A paper has been presented to the CLAWAR 2001 conference in Karlsruhe
Further progress in the development of the ROBOVOLC system (PDF 1.6MB)
Milestone 2 reached definition of the specification and design scheme for the system and for all subsystem completed and agreed by all partners.
Deliverable D3.2 Final report on system specification and validation plan prepared.
Go Back to WP Menu'
WP4 External sensors and manipulator
Task 4.1 Selection of a location methodology
A suitable DGPS system has been selected and tested. A localization system based on multisensor fusion has been designed and tested.
A paper has been presented at the CLAWAR 2002 Conference in Paris:
Localization using fuzzy and Kalman filtering data fusion (PDF 114KB).
Task 4.2 Modelling of the environment
A modeling strategy based on stereoscopy and on specifically designed software has been developed.
Task 4.3 Selection of sensors for physical data collecting
IR cameras, video cameras, still image camera, radar doppler sensors have been selected and integrated on a telecontrolled pan-tilt.
Task 4.5 Selection of a system for chemical analysis of gas
A system for gas collecting and analysis has been designed and built.
The system is based on a titanium probe moved by the manipulator to sample gas from the fumaroles. Local analysis of CO2, O2, and temperature is performed and automatic storage of gas samples is performed.
Task 4.5 Manipulator design and build
The final version of a 5dof SCARA manipulator has been designed and built.
A three fingers gripper for rock sampling and instrument pick and place has been designed and built.
Task 4.6 Integration of sensors and devices
Hardware and software architecture of the science computer has been designed and built.
Go Back to WP Menu'
WP5 Robot Design
Task 5.1. Mechanical Design
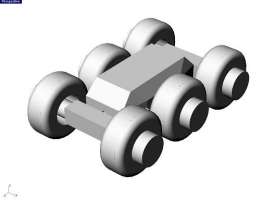
An early prototype platform has been specified allowing for early implementation of some aspects of the system and early software development. This allowed to reduce risk in the later stages of the project, in particular software integration. The prototype has been manufactured and tested in october 2001.
The Robovolc system has been modelled using a computer solid modelling package. This will enable the design of the manipulator and platform to be verified for kinematic performance before manufacturing takes place.
The final platform has been designed and built.
|
|
|
|
Platform Design
|
The final Platform
|
Task 5.2 Electrical/Electronic Design
The main computing hardware has been specified and selected. The control and communication components have been selected. The embedded processor system has been prototyped and bench tested
Task 5.3 Motion Control Strategy and software structure
The software structure has been detailed at the lower levels. Functional modules have been defined and interface specifications written.
Software modules have been prototyped for the lower levels of the software structure. Functional testing has been completed for these modules which have been ported onto the platform.
Go Back to WP Menu'
WP6 Robot navigation and operator intervention
Task 6.1 Navigation and path planning strategies
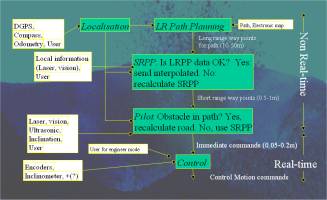
The overall navigation system has been divided into four parts:
- Localisation (where am I).
- Path planning (where will I go next)
- Locomotion
- Manipulator Control
|
|
The overall navigation system.
|
Task 6.2 User interface
The User Interface system provides the ability to control the robotic mobile platform, robot manipulator and the science sensors on the robovolc system.
It will also display the science data collected by the robot, i.e. the temperature, gas analises, etc, as well as images of the volcanic environment.
The hardware required for this purpose comprise 2 joysticks, keyboard, touchscreen and a loudspeacker.
Go Back to WP Menu'
WP7 Integration
The plan for integration activities has been prepared.
Manufacturing of final six wheeled platform completed, integration with first version of motion control board performed, integration with radio link for teleoperation performed.
Manufacturing of final manipulator and gripper performed.
Navigation strategies for the robot base and the manipulator arm have been determined. First release of navigation software and user interface.
First release of localisation software ready.
All sensors have been acquired and tested. Integration and interfacing of all sensors performed.
Integration of Manipulator and sensors on the platform performed.
Go Back to WP Menu'
WP8 Trials and demonstrations
Two weeks of trials performed in September 2002 in Etna volcano and in laboratory.
From the tests a list of planned modifications for the subsystems has been prepared.
Go Back to WP Menu'
WP9 Exploitation Dissemination and Implementation
Updates of the WEB sites http://www.robovolc.dees.unict.it
Several papers submitted or presented to various conferences and journals to disseminate results of the project.
National italian televisions (RAI1, Canale5 and LA7) and regional televisions (Antenna Sicilia, Teletna, Antenna 1), broadcasted videos of the trials and interwiews to the partners.
Several newspapers announced the results of the trials.
Some articles have been also published on popular science magazines.
List of scientific papers published:
- G. Muscato, G. Nunnari, S. Guccione, "Robots for Volcano Exploration: A New Perspective", World Automation Congress (WAC2000), Eight International Symposium on Robotics with Applications, Maui (Hawaii, USA), 11-16 June 2000.
- G. Muscato, "ROBOVOLC: A robot for volcano exploration, a new European project arising from the CLAWAR network", CLAWAR News: The Newsletter of the EC Brite Euram Thematic Network for Climbing and Walking Robots, p. 9, Issue 5, Aug. 2000.
- S. Guccione, G.Muscato, G.Nunnari, G.S. Virk, A.K.M. Azad, A. Semerano, M. Ghrissi, T.White, C. Glazebrook, "Robots for Volcanos: The State of the Art", Proceedings of the 3rd International Conference on Climbing and Walking Robots (CLAWAR 2000), pp.777-788, Madrid (Spain), 2-4 October 2000.
- A.K.M. Azad, G.S. Virk and M. Qi, G. Muscato, S. Guccione, G. Nunnari, T. White, C. Glazebrook, A. Semerano, M. Ghrissi, P. Briole, C. Faucher, M. Coltelli, G. Puglisi, R. Cioni and M. Pompilio, "ROBOVOLC: Remote Inspection for Volcanoes", Workshop on Autonomous artificial systems exploring hostile environments, International NAISO Congress on Information Science Innovations (ISI'2001), Dubai, March 18th 2001.
- S. Guccione, G. Muscato, "Experimental outdoor and laboratory tests with the hybrid robot WHEELEG", Proceedings of the 3rd International Conference on Field and Service Robotics, Helsinki (Finland) June 11-13, 2001
- S. Guccione, G. Muscato, "Test of the hybrid robot WHEELEG on a Volcanic Environment", Proceedings of the 2001 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Como, Italy July 2001, p.3.
- G. Muscato, S. Guccione, N. Savalli, M. Coltelli, G. Puglisi, P. Briole, C. Faucher, G.S. Virk, A. Azad, A. Semerano, V. Duporque, T. White, G.S. Rees, "Further progress in the development of the ROBOVOLC system", 4th International Conference on Climbing and Walking Robots CLAWAR 2001, pp. 997-1004 Karlsruhe (Germany), 24-26 September 2001.
- S. Guccione, G. Muscato, "ROBOVOLC: un robot per l'esplorazione dei vulcani", 45° Convegno Nazionale ANIPLA Automazione 2001, Ancona, 22-23 Novembre 2001.
- D. Caltabiano, G. Muscato, "A Comparison between different traction methods for a field robot", IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2002, Lausanne Switzerland, Sep.30-Oct.4 2002.
- M. Lacagnina, S. Guccione,G. Muscato, R. Sinatra, "Modelling and Simulation of Multibody Mobile Robot for Volcanic Environment Explorations", IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS 2002, Lausanne Switzerland, Sep.30-Oct.4 2002.
- D. Longo, G. Muscato, V. Sacco, "Localization Using Fuzzy and Kalman Filtering Data Fusion", 5th International conference on Climbing and Walking Robots, CLAWAR 2002, Paris France, September 25-27, 2002.
- G. Muscato, D. Caltabiano, S. Guccione, D. Longo, M. Coltelli, A. Cristaldi, E. Pecora, V. Sacco, P.Sim, G.S. Virk, P. Briole, A. Semerano, T. White,”ROBOVOLC: A Robot for volcano exploration – Result of first test campaign”, Industrial Robot : An International Journal, Vol. 30, N.3,pp.231-242, 2003.
- D. Caltabiano, G. Muscato, “A new localisation algorithm for mobile robots in outdoor environments“, 6th International Conference on Climbing and Walking Robot, Catania (Italy), pp. 925-932, 17-19 September 2003.
- P.Sim, V.Sacco, G.S. Virk, “HCI Development for the Robovolc system“, 6th International Conference on Climbing and Walking Robot, Catania (Italy), pp. 155-162, 17-19 September 2003.
- V.Sacco, G.S.Virk, “Design and development of a six-wheeled rough terrain vehicle”, 6th International Conference on Climbing and Walking Robot, Catania (Italy), pp. 251-257, 17-19 September 2003.
- S. Guccione, G. Muscato, "Control Strategies Computing architectures and Experimental Results of the Hybrid Robot Wheeleg", IEEE Robotics and Automation Magazine, (IEEE Piscataway, U.S.A.), December 2003.
- M. Lacagnina, G. Muscato, R. Sinatra, “Kinematics, Dynamics and Control of a Hybrid Robot Wheeleg“ accepted for publication in the Journal Robotics and Autonomous Systems, December 2003
The exploitation plans have been developed. It is clear from this early work that potentials for the exploitation of the robotic vehicle exists within volcano research as well outside it.
Go Back to WP Menu'
|