Test Campaign
|
| Attendees | |
| Outline | |
| Picture Gallery | |
| Video Gallery |
Attendees
- UNICT : Giovanni Muscato, Salvatore Guccione, Domenico Longo.
- INGV : Mauro Coltelli, Antonio Cristaldi, Michele Prestifilippo, Daniele Caltabiano, Luciano Cantelli, Giacomo Spampinato.
- IPGP: Pierre Briole, Nicolas Houlie, Marcello de Michele.
- UNI-PO: Exit from project.
- PORTECH: Exit from project.
- ROBOSOFT: Aida Goumbele, apologies from Dominique Touya
- BAE SYSTEMS: Tim White, Richard Alexander.
- UNIVLEEDS: Gurvinder S. Virk, Patrick Sim.
EC: Apologies from Prof. M. Bergamasco and Dr. M. Verdese.
Outline
This second test campaign included the review meeting and a press conference to demonstrate the capabilities of the Robovolc system to the public.
Each of the Robovolc subsystems was tested during the review and the results are summarised in the following sections.
Results
Communications
The communication system consists of a long-range Wireless LAN that allows all the computers inside the rover (Rover PC, Manipulator PC, Science PC) to be interfaced with the Console PC.
A low-speed serial modem as backup is connected to recover situations when the wireless communications fail. No problems have been observed with the wireless LAN during the trials.
A video/transmitter and receiver connects all the video equipment on the rover to the base station. The input of the transmitter is connected to a remotely operated switch to select a video channel at a time. Initially the transmission were received in Black and white. Following a small modification of the transmitter and receiver the problem has been solved and the video transmitter worked well.
The other communication system was the connection between the base DGPS and the rover DGPS for the transmission of the differential signals. This transmission has generated sometimes some problems and the differential signals in some trials was not received. The problems was mainly due to the high power of the transmitter that during trials performed in a short distance caused some problems in the receiver. When the trials have been performed in longer distance the problem was no more observed.
Console Hardware
The console hardware consists of two ruggedised laptop PC connected in a LAN to the wireless LAN receiver. The first laptop is devoted to the teleoperation of the rover and of the manipulator through a graphical interface and two joysticks. The second laptop is devoted to the teleoperations of the science package. A video monitor is connected to the video receiver to show the video signals coming from the rover. A protective carry case host the rover laptop, the joystick the video monitor, the wireless lan receiver and the lan switch. Some improvement should be done in the assembly of all the subsystems in the protective case to speed-up the set-up of the system on the field.
Console PSU
All the equipment in the Console are powered by using a 1kW 220V Internal combustion generator. No problems have been observed in the adoption of this system.
HMI
The HMI allow to teleoperate the rover by using the joystick. Some modifications have been suggested and implemented during the trials to allow to change the speed of the rover.
The HMI allow also to teleoperate the manipulator in different modalities by using the joystick. The teleoperation allowed during the trials to remotely control the arm to collect samples of rocks.
Science Package
Consists of:
- Pan tilt: The Pan-tilt allow to orientate the following sensors mounted on it: Infrared camera, videocamera, videorecorder camera, High resolution still image camera.
- IR camera: teleoperated in most of the setting and operation allow to view thermal map of the environment and to shoot thermal images stored in a flash memory card on-board.
- Videocamera: telecontrolled in most of the operation allows to telecontrol the system in most of the operations.
- Videorecorder camera: Allows to record on a DV tape the images. Most of the main operations (on/off, record, zoom in/out) can be teleoperated.
- High resolution still image camera: Allows to store HR images into a Compact flash. The teleoperations consists in the shooting of the images and the download of the images.
- Gas sampling system: It has not been tested during this trial and will be tested in the next trial campaign.
- DGPS: The DGPS is adopted to sample the position of the rover to reconstruct terrain deformations.
Manipulator
The manipulator movement has been tested successfully. The arm was capable to collect sample of rocks and put them inside a basket through teleoperation. Some improvement are needed in the protection of the manipulator from dust and rain. Moreover to avoid damages of the manipulator during transportation some locking system, to be adopted when the system is not in use, should be installed.
Navigation
The navigation system has been tested by using teleoperation. Several cameras have been installed to view front and rear of the rover and on the gripper to help during rock picking.
Autonomous navigation was not tested and will be tested during the next test campaign.
Platform Mechatronics
The rover has been tested on sandy terrain and in more hard surfaces. During the test on the sand some problem in the traction of the rover occurred. These problems have been almost solved by using a different type of tyres, moreover during the next test campaign a different low level control system will be adopted to improve the traction control of the rover.
Platform PSU
The two groups of batteries gave the system the needed autonomy to fulfil the requirements.
An additional charger should be adopted to allow to recharge in parallel both groups of batteries.
Platform Infrastructure
No problems have been observed in the platform infrastructures.
Tele-operation Sensors
A video camera with zoom was installed on the pan/tilt, four fixed cameras have been installed to view the four corners of the rover and two extra fixed cameras have been used to view the manipulator. The cameras are connected to a remotely controlled video switch to select one channel to be remotely transmitted to the base station. The position and orientation of the fixed cameras can be adapted each time to each specific mission.
Field Trials
Three different environments have been selected for the trials:
28 June 2003
Trials on soft sand. Traction control is required. Extra tyres needs to be tested. Test of manipulator in picking rocks performed successfully. Test of teleoperations performed successfully. Test of sensors for science performed successfully.
1 July 2003
The rover has been successfully teleoperated to move inside one the crater of the eruption Dec 2002-Jan 2003. Traction performing successfully on rocky terrain. Manipulator test and sensor for science test not performed since battery not fully charged and voltage going down rapidly. Test of different tyres on sand terrain performed successfully.
2 July 2003
Press conference. Demonstration on volcanic environment performed successfully, showing teleoperation, sensors for science and gripping of rocks.
4 July 2003.
Test of gas sampling system performed at INGV labs. The system has been tested to simulate a gas sampling procedure inside a gas fumarole.

Fig. 1 1st July. The robot moving inside one the crater of the eruption Dec 2002-Jan 2003.

Fig. 2 Manipulator and pan-tilt turret

Fig. 3 Picking a rock sample

Fig. 4 Change of tyre type

Fig. 5 Transportation on test site

Fig. 6 Test of different tyre type
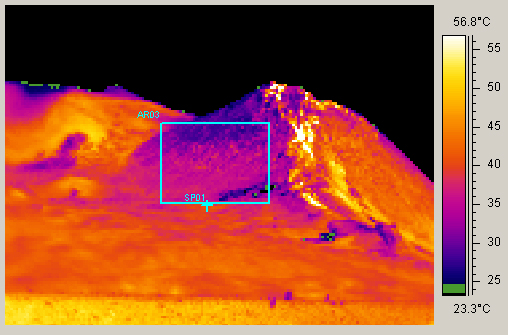
Fig. 7 Thermal image of the S.E. crater done by the robot with the IR camera
