|
|
| Attendees | |
| Outline | |
| Picture Gallery | |
| Video Gallery |
Attendees
- UNICT : Giovanni Muscato, Salvatore Guccione, Domenico Longo.
- INGV : Antonio Cristaldi, Michele Prestifilippo, Daniele Caltabiano, Luciano Cantelli, Giacomo Spampinato, Emilio Pecora.
- IPGP: .
- UNI-PO: Exit from project.
- PORTECH: Exit from project.
- ROBOSOFT: Benoit Rameix, Pierre Pomiers
- BAE SYSTEMS: Richard Alexander.
- UNIVLEEDS: Vincenzo Sacco.
Outline
The purpose of this trials was to integrate into the rover the new traction control system and to test it. MPC555 boards have been installed inside the robot for the low level control of the speed of the robot, thus allowing individual control of the speed of each wheel.
The system has been tested in the INGV laboratory of Nicolosi and has shown considerable improvement.
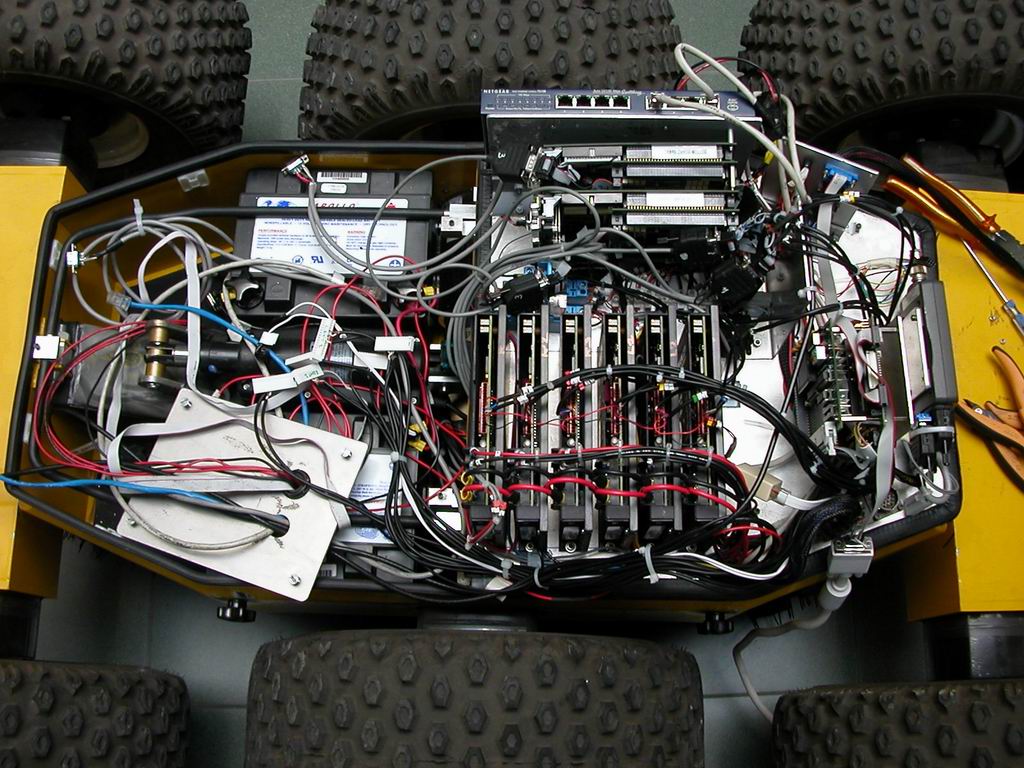
Fig. 1 Internal view of the robot with then new low level control boards installed

Fig. 2 Traction control test at INGV laboratory in Nicolosi

Fig. 3 Climbing capability test at INGV laboratory in Nicolosi
