|
|
| Attendees | |
| Outline | |
| Picture Gallery | |
| Video Gallery |
Attendees
- UNICT : Giovanni Muscato, Salvatore Guccione, Francesco Russo.
- INGV : Antonio Cristaldi, Daniele Caltabiano, Luciano Cantelli, Giacomo Spampinato, Emilio Pecora.
- IPGP: .
- UNI-PO: Exit from project.
- PORTECH: Exit from project.
- ROBOSOFT: .
- BAE SYSTEMS: .
- UNIVLEEDS: Vincenzo Sacco.
Outline
During this period extensive test on the localisation system were performed. The details are reported in the deliverable D7.fin.
The localization algorithm is a key factor in semi-autonomous mobile robots in outdoor environment. A fail on the localization algorithm can compromise the mission outcomes and might drive the robot in critical places.
The navigation system of Robovolc requires an estimation of the absolute position and orientation of the robot with the following characteristics:
- Reliability even if no absolute correction is available for short periods.
- Availability of new samples with a frequency higher than 10 Hz.
Fusing of some dead-reckoning sensors with some absolute sensors can lead to the desired requirements.
Actually dead-reckoning sensors, like encoders, can give a good estimation of relative movements with a very high frequency (e.g. 1 KHz) but their accuracy decreases with time due to wheel slippage, sensors biases or not exact knowledge of the robot model.
A Differential GPS (DGPS) system can give very precise measures of the position but it can not estimate the orientation of the robot, moreover its estimations can become really unreliable if large obstacles (like big rocks in the mountain or tall buildings in the city) reduce the number of visible satellites or the differential correction of the other receiver is lost, finally its sampling frequency is generally low (e.g. 1 Hz).
For this reason it has been chosen to use an Extended Kalman Filter (EKF) that, fusing the measurements of both kind of sensors, can collect the qualities of all the sensors and obtain fast and accurate measures; in fact the GPS compensate the uncertainty of the dead reckoning sensors while the latter permit to have estimations at high frequencies.
Detailed description of the localisation system is described in the deliverable D7.fin. In the following a short summary of the results obtained during these trials is reported.
Summary of results
Test of the EKF3 algorithm.
This algorithm allow a faster recovery of the initial orientation of the system with respect to a classical EKF by using an estimation of the orientation measure. In the following figures the small circles are proportional to the variance of the measures.
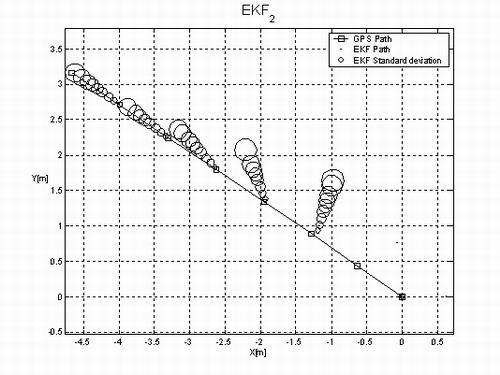
Fig. 1 Transient of the EKF2 algorithms of the Robovolc tests.
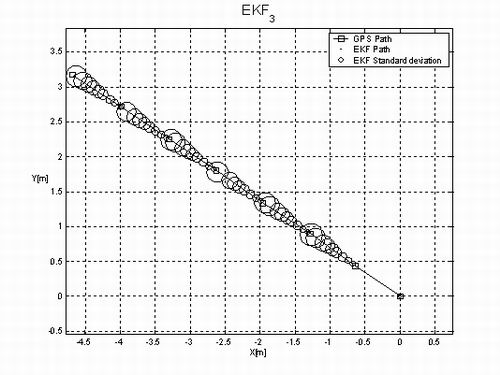
Fig. 2 Transient of the EKF3 algorithms of the Robovolc tests.
Self calibration of kinematic parameters.
The EKF relies both on the DGPS system and the odometry sensors, if for a while the DGPS system is not reliable (due to multi-path effect or insufficient number of visible satellites or loss of the differential correction) the algorithm must be able to produce good estimation of the position and orientation of the robot and allow the user to move the robot to a safer place.
The quality of these estimations depend strongly on the parameters of the model, hence find the right parameters is very important and allow longer movements without the GPS.
A self calibrating procedure based on an Extended Kalman Filter with augmented state has been developed and tested.
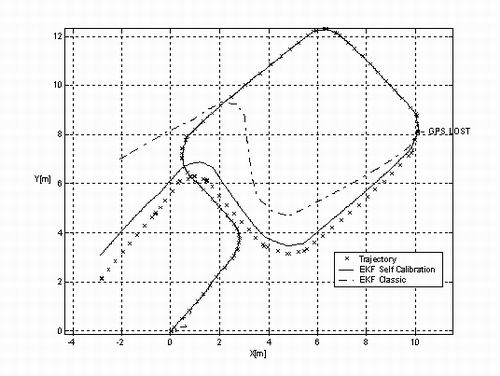
Fig. 3 Comparison between the estimated trajectories obtained with
the standard EKF and the EKFSC during the Robovolc tests.
